'MorphEyes' stereo camera system improves quadrotor UAV navigation
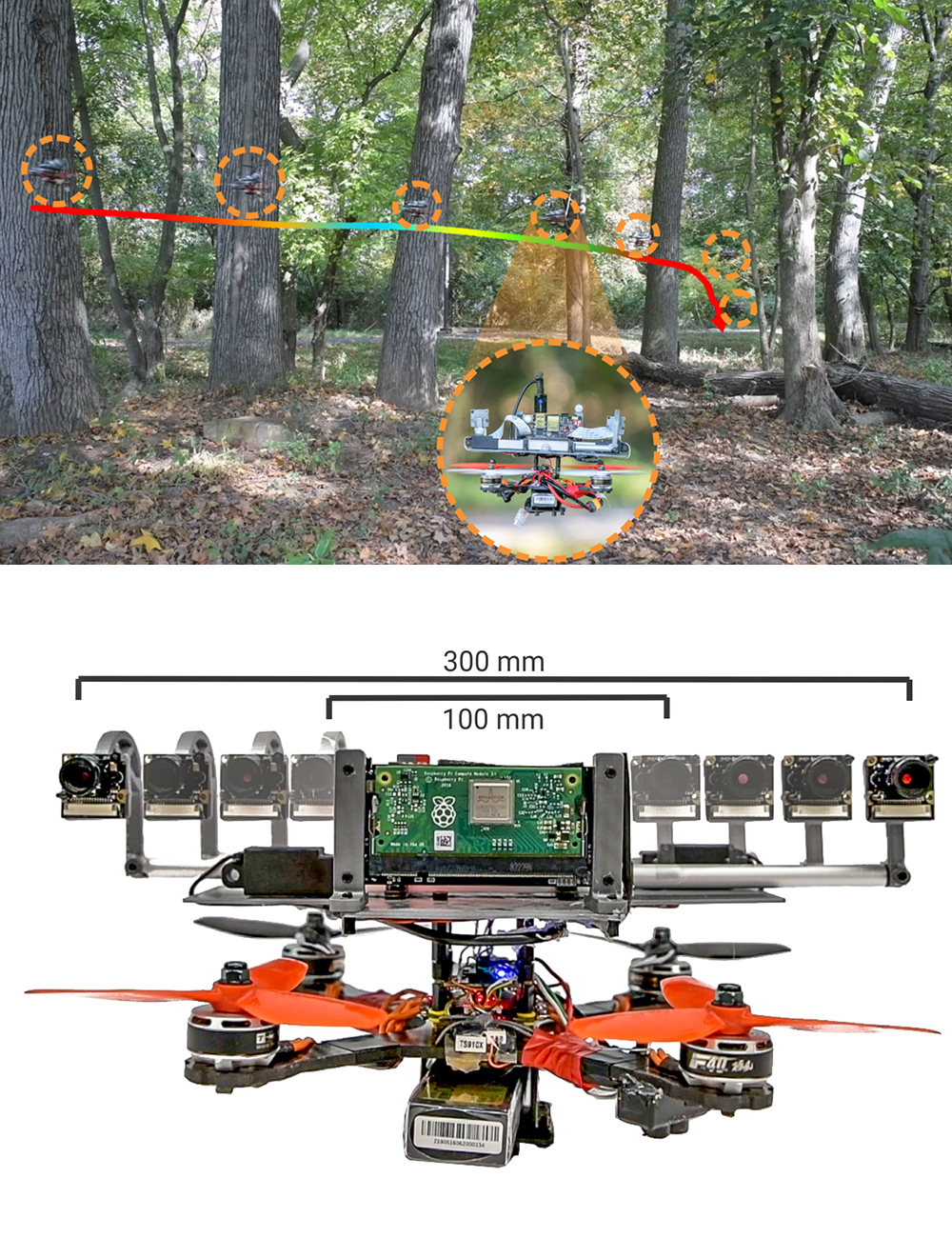
Above: Flying through a forest, the baseline of the quadrotor’s stereo system changes and is colored coded (blue to red indicates 100 mm to 300 mm baseline). Below: Variation of baseline from 100 mm to 300 mm. Notice that at the largest baseline, the stereo system is bigger than the quadrotor. Source: Figures from the paper.
Researchers improving quadrotor unmanned aerial vehicles (UAVs) are coming close to achieving a long-sought goal: once UAVs can fly autonomously, concepts like drone delivery of packages could become a reality.
Advances have been made because of extensive research in Simultaneous Localization and Mapping (SLAM) and Visual-Inertial Odometry (VIO). These technologies provide metric depth for mapping that can be directly used to perform path planning and achieve navigation.
SLAM and VIO work well when stereo cameras are mounted on the UAV. These cameras offer a balance of accuracy, computation power and weight. However, they suffer from a major drawback. Error grows quadratically with depth, meaning that depth in the near-range far exceeds depth in the far-range.
Because some UAV scenarios require highly accurate far-range depth, the current solution is to increase the near-range camera resolution. Unfortunately, this comes at a prohibitively expensive computational cost. Instead, a stereo system with a variable baseline could be implemented.
Such “morphable design” is commonly observed in birds, which can constantly adapt their eyes so that their depth-sensing range is at the optimal value for tracking. Until now, SLAM/depth estimation and morphable designs have been mutually exclusive. If they were combined, UAV navigation could greatly benefit.
Recently, Nitin Sanket, Chahat Singh, Varun Asthana, ISR-affiliated Associate Research Scientist Cornelia Fermüller (UMIACS) and ISR-affiliated Professor Yiannis Aloimonos (CS/UMIACS) presented a framework for quadrotor navigation based on a stereo camera system with a baseline that is adaptable “on the fly.” This work by the University of Maryland Perception and Robotics Group is the first to use morphable design to achieve a variable baseline stereo vision system on a quadrotor UAV.
In their paper MorphEyes: Variable Baseline Stereo for Quadrotor Navigation, the researchers demonstrate a way to calibrate the system at a small number of discrete baselines and interpolate the parameters for the entire baseline range. The group presents an extensive theoretical analysis of calibration and synchronization errors. They also showcase three different applications of the system for quadrotor navigation: flying through a forest, flying through an unknown shaped/location static/dynamic gap, and accurate 3D pose detection of an independently moving object.
The new variable baseline system is more accurate and robust in all three scenarios than existing systems.